
Currently I am a Research Consultant for Droneview BV, Netherlands. I am also exploring interesting topics spanning RL and 3D vision. Previously I was a research assistant at the Robotics Research Center (RRC) , IIIT Hyderabad, under the guidance of Prof Madhava Krishna . My interest lies in the field of Robot Learning and 3D Vision.
I graduated from BITS Pilani in 2023 with an M.Sc. in Physics and a B.E. in Mechanical Engineering. I joined RRC, IIIT Hyderabad for my Bachelor's Thesis, where now I am continuing as a Research Assistant. I was also fortunate to have opportunities to collaborate with Prof Arun Kumar Singh (University of Tartu, Estonia), during my time at IIIT Hyderabad.
Research Interests & Ideas
My research interests focus on the trio of action, perception, and cognition, where I aim to build machines that can perceive and understand the real world, recognize the physical consequences of their actions, and explore novel behaviors to achieve complex goals. A few fundamental question in the field of robot learning that I am interested in are: 1. At what level in the TAMP hierarchy should we build robust representations for embodiment generalisation? 2. How can we learn to control robots in a data efficient manner? 3. Can learning a grounded 3D scene representation help in learning better policies? 4. How can we leverage sub-optimal transition and state data to build better policies. Inverse-RL based labelling of data (Depth Anything V2 like synthetic trainnig for Inverse RL and relabeeling real data) with Offline RL or Goal Conditioned Offline RL at scale to augemnt data for Offline RL which is better? 5. Is there a way to build composable policies for composable robot. (manipulator + mobile robot = mobile manipulator, is there a way such that manipulation policy + mobile robot policy = mobile manipulator policy) 6. Can we create a unified representation for all forms of robots like manipuilators, humanoids, quadrupeds, mobile manipulators,... (excluding soft robots; that's too ambitious for now)
Recent Work
Timeline
- [ June 2023 ] Started as a Research Fellow at Robotics Research Center, IIIT Hyderabad under the guidance of Prof. Madhava Krishna.
- [ June 2023 ] Graduated from BITS Pilani with an M.Sc. in Physics and a B.E. in Mechanical Engineering.
- [ May 2023 ] Defended my off-campus bachelor's thesis on Multi-Agent SLAM for drones, conducted at RRC, IIIT Hyderabad, under the supervision of Prof. Madhav Krishna (IIIT Hyderabad) and Prof. Amit Singh (BITS Pilani).
- [ Nov 2021 ] Won a Silver Medal at The 2021 University Physics Competition.
- [ 2020 ] BITSAA approved funding of approximately $25,000 for TEAM BITS ROBOCON's Autonomous Drone and Quadruped projects. Although progress was significantly delayed by the COVID-19 pandemic, the projects are now being continued by the team's junior members.
- [ 2019 ] Joined TEAM BITS ROBOCON as a freshmen, working on quadruped, micromouse and drones; served as Treasurer for 2020-21.
Publications
* Denotes equal contribution
 MetricGold: Repurposing Diffusion-Based Image Generators for
Metric Depth Estimation
MetricGold: Repurposing Diffusion-Based Image Generators for
Metric Depth Estimation
Ansh Shah, K. Madhava Krishna
[Arxiv]
This paper explores an approach for monocular metric depth estimation that utilizes generative diffusion models and a log-scaled metric depth representation, achieving sharper and more accurate metric depth predictions across diverse scenes through synthetic data training.
Projects
(Click on project to view more)
Major Projects
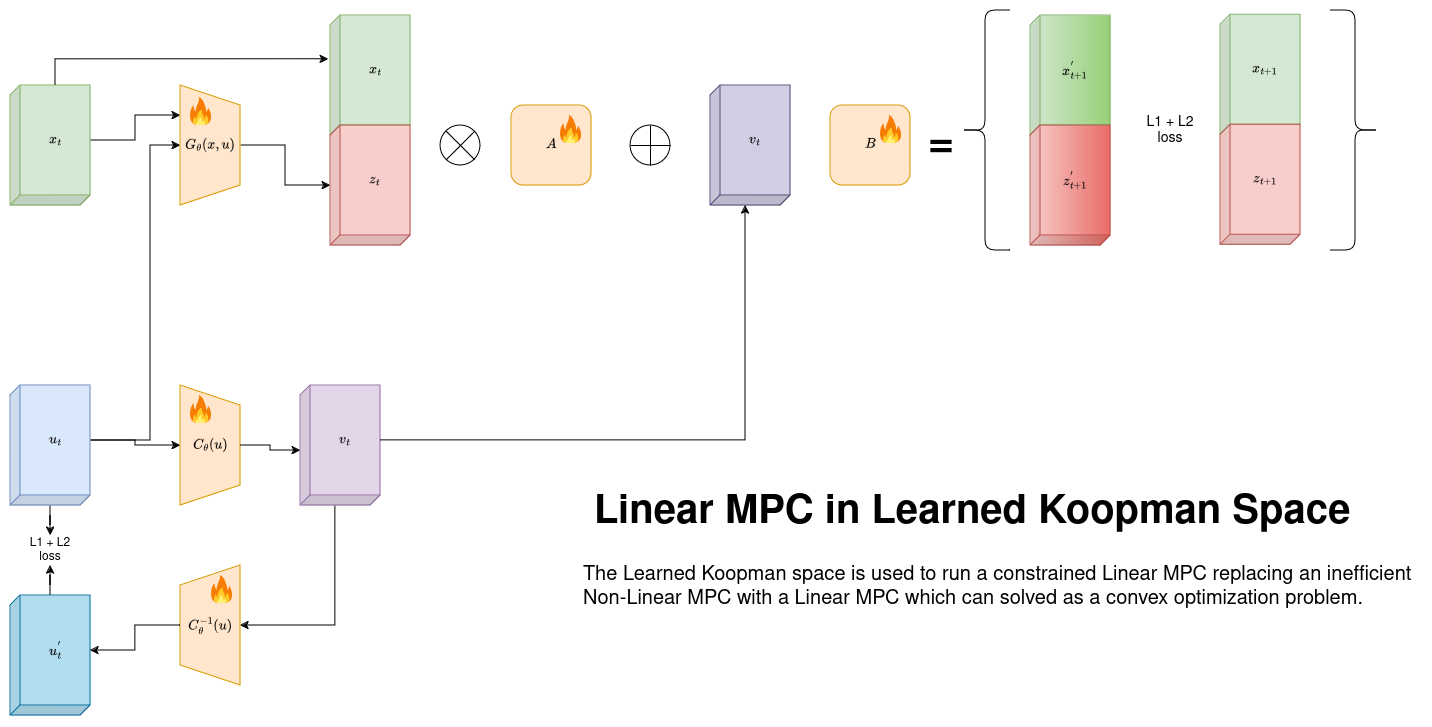 Koopman Theory in Deep Learning for Linearizing Drone Dynamics
Koopman Theory in Deep Learning for Linearizing Drone Dynamics
Bhanu Teja*, Ansh Shah*, Mihir
Ungarala*, Prof Arun Singh, Prof K Madhava Krishna
Robotics Research Center, IIIT Hyderabad
Can dynamics linearisation help in computationally cheaper and faster control of drones? We explore the idea of using Koopman theory to linearise the dynamics of a drone and then use a LinearMPC to control it.
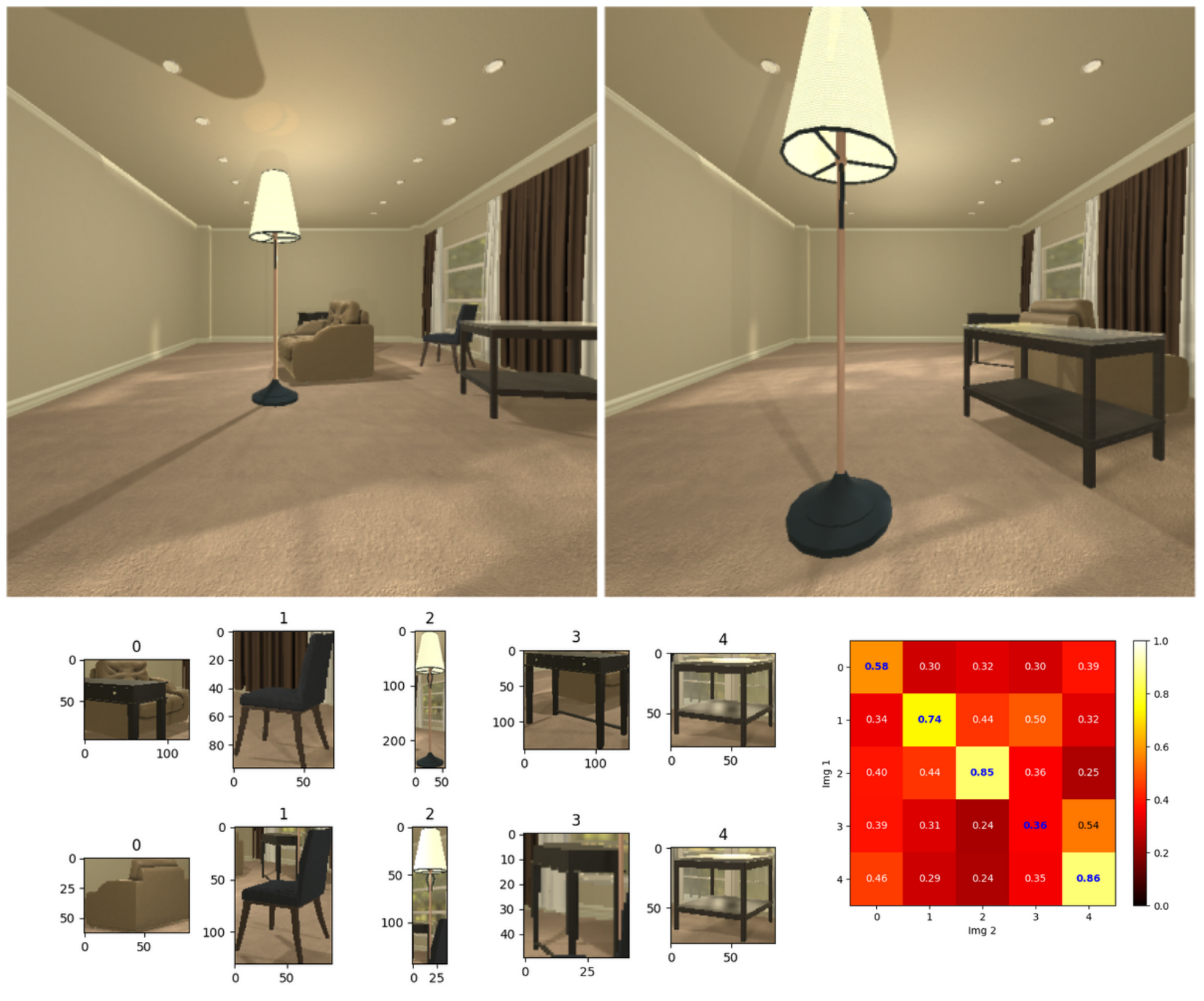 Object Associtaion in rearranged scenes for change detection and
loop closure registration with pairwise geometric consistency
Object Associtaion in rearranged scenes for change detection and
loop closure registration with pairwise geometric consistency
Ansh Shah*, Aneesh Chavan*, Sarthak Chittawar, Dr. Krishna Murthy , Prof Chetan Arora, Prof K Madhava Krishna
Robotics Research Center, IIIT Hyderabad
An Embodied agent in a household setting has to localise itself in rearranged indoor spaces. Relying on normal descriptors can be tricky as small feature rich objects can get rearranges. To mitigate this problem we explored using object instance based localisation.
 Multi-Agent SLAM
Multi-Agent SLAM
Bhanu Teja*, Ansh Shah*, Mihir
Ungarala*, Prof Amit Singh, Prof K Madhava Krishna
Robotics Research Center, IIIT Hyderabad | BITS Pilani

Mini Projects
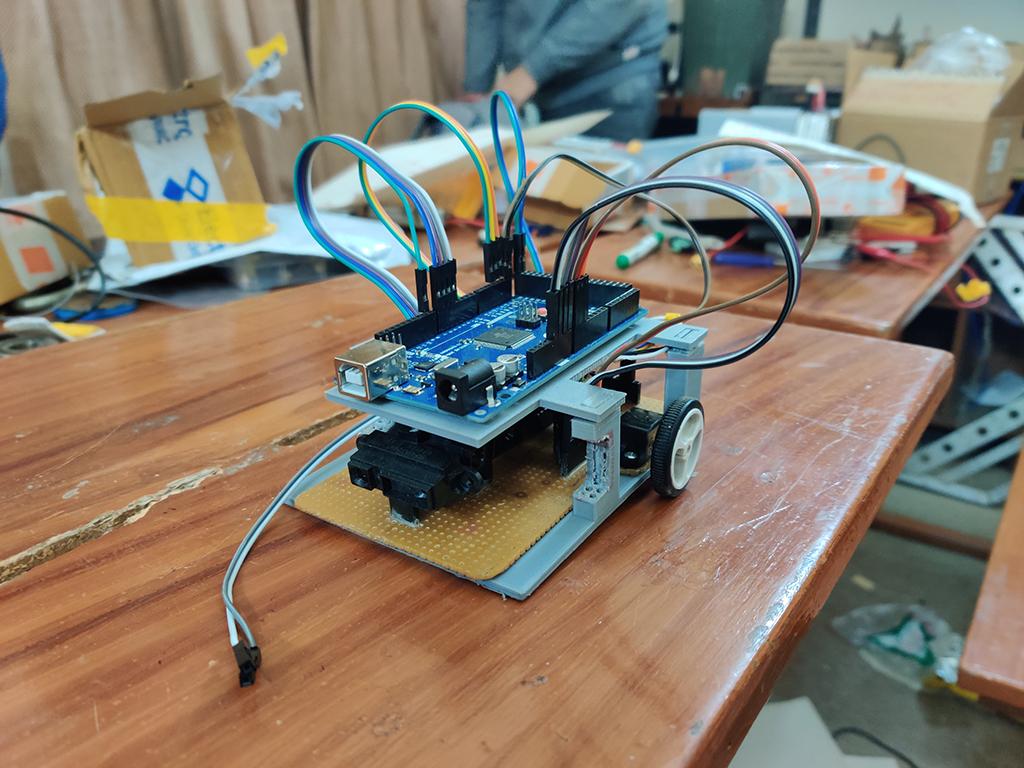
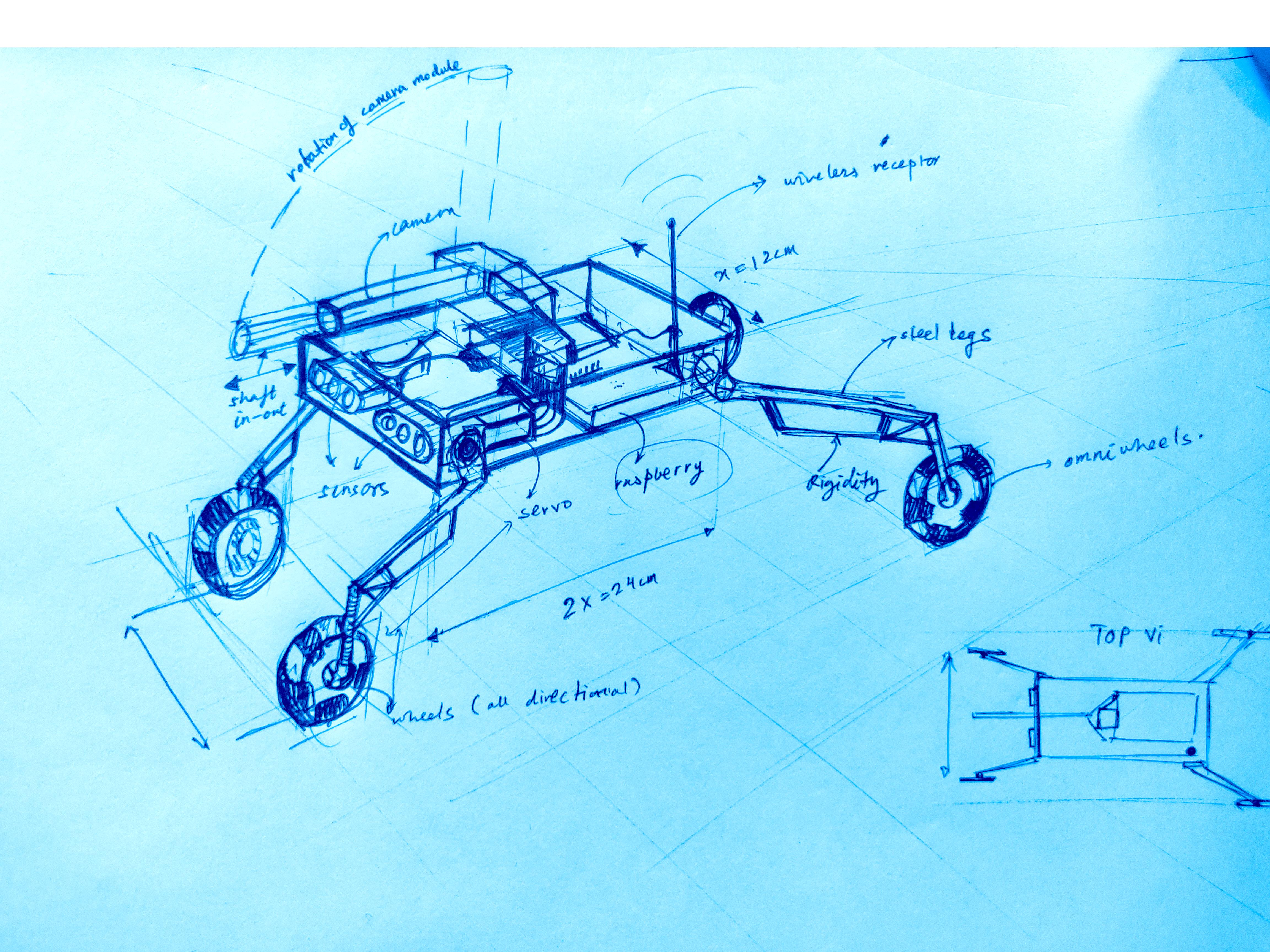 CRONUS: A Quadrupedal + Holonomic Drive surveillance bot
CRONUS: A Quadrupedal + Holonomic Drive surveillance bot
Ayush Agarwal, Ansh Shah, Atharv Arora, Ananya Khandelwal
BITS Pilani
Github
Teaching
- In 2024, I took lectures for the RRC Summer School 2024: the first on ICP SLAM & Graph Based SLAM, second on CNN, RNN and Transformer Architecture.
- I served as a lecturer for the Mobile Robotics 2023 course at IIIT Hyderabad, where I took three lectures: the first on Simultaneous Localization and Mapping (SLAM), followed by Graph-Based SLAM, and a coding demonstration on pose graph optimization and Landmark SLAM with GTSAM. For details, see the code and the blog post. This was part of my role as a Research Fellow at RRC.
- During my tenure at Team BITS Robocon, I mentored junior team members in tasks related to mechanics, design and programming. Additionally, I conducted interviews to assess potential candidates interested in joining the team.